CNC


CNC - Computer numerical control
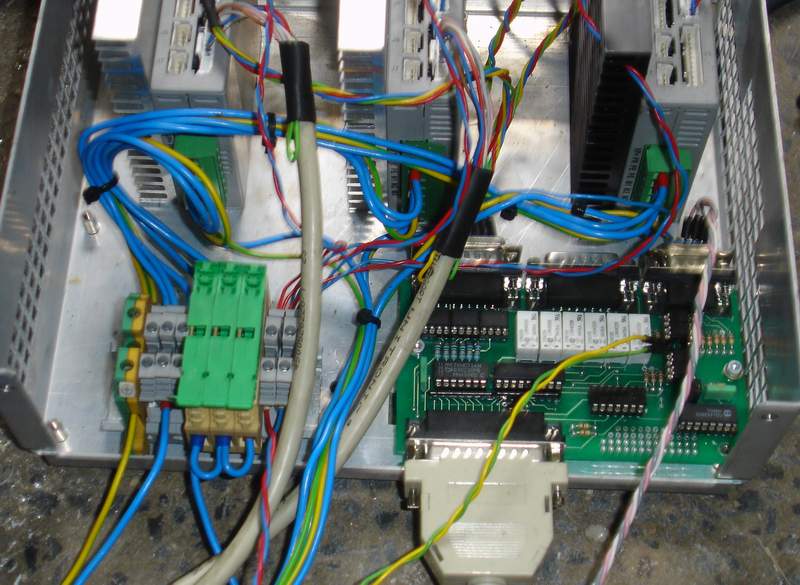
Kažkada buvo užgimusi mintis garaže iš visokių atliekamų gelžgalių pagaminti programines graviravimo stakles (router). Kadangi tą neblogai išmanau (iš to gyvenu) tai neturėtų būti labai sunku. Pririnkau krūvą sraigtų, variklių. Plokštę variklių pavarų valdymui sukurpiau.
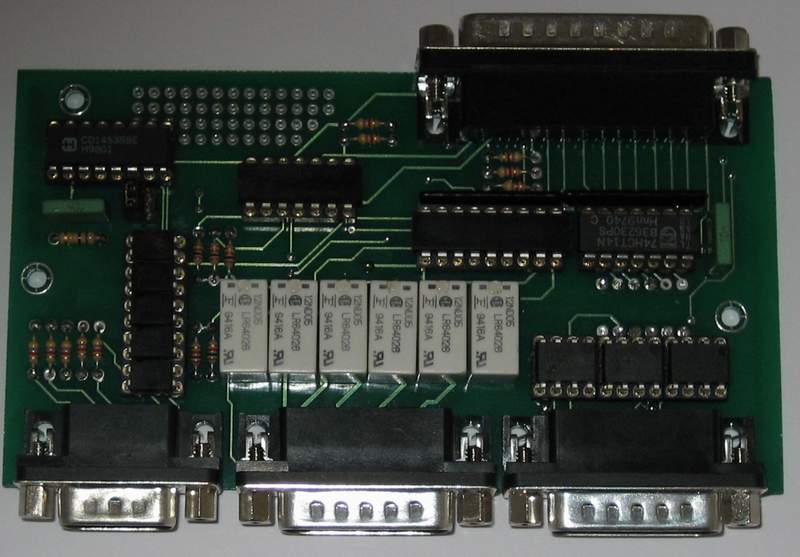
Plokštė skirta optiškai atrišti PC nuo jėginės dalies. Jungiasi prie LPT porto. Programas galima naudoti įvairias - KCAM, TurboCNC ir t.t. Dauguma jų - freeware.
Plokštė turi 5 rėlinius išėjimus, step/dir išėjimus 3 pavaru valdymui, 5 įėjimus. Yra apsauga nuo programos arba PC pasikabinimo. Schemos normaliame formate kol kas nėra, yra tik pieštuku ant popieriaus.
Beja, jau pavyko išbandyti plokštę su realia mechanika. Veikia puikiai ir su notebuku ir desktop PC. Aprašinėti visą gamybos eigą ganetinai sunku, bet ateity pasistenksiu. Pasakysiu, kad panaudotos servo pavaros su optiniais atskaitos davikliais ir nuolatinės srovės varikliais. Jaučiu alergiją žingsniniamas varikliams. Nors tai nėra blogas (svarbiausia pigus) variantas pirmosioms staklėms.



{kind=link}
O čia keletas gerų linkų mėgėjiško CNC tema:
http://www.rcdesign.ru/articles/tools/cnc_mechanics
http://jwstolk.xs4all.nl/millp.htm - verta pamatyti !!!!
O čia šiek tiek teorijos apie servo sistemą (nemaišykite su radio valdomų modelių servo):
Bet kuriuo atveju servo sistema reiškia kontroliuojamą elektrinį variklį (stepper-žingsninį, DC brush nuolatinės srovės su šepečiais, brushless - be šepečių ar kitokį), kuris sukuria jėgą vykdomąjam mechanizmui. Dažniausiai variklio iėjimo velenas prijungtas prie kažkokio mechaninio mazgo , kuris keičia sukamąjį judesį į inijinį (be abejo yra ir linijinių variklių - linear motor).
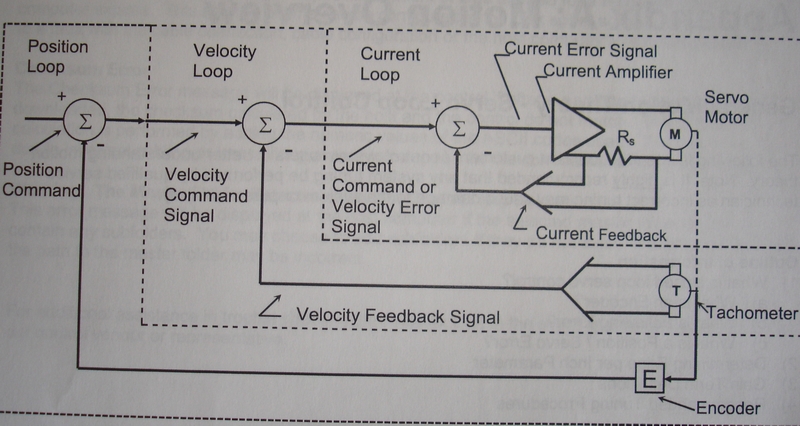
Uždara servo kilpa - su grįžtamuoju ryšiu (Closed Loop Servo System) atlieka pastovų (ar atnaujinamą kas kiek tai laiko -priklauso nuo kontrolerio, ar pavaros) pozicijos arba/ir greičio reikšmių matavimą. Išmatuotos reikšmės yra sulyginamos su užduota reikšme ir daroma pataisa, kad atlikta atitiktų užduotą.
Servo sistema be grįžtamojo ryšio (Open Loop Servo System) neturi šios funkcijos ir nėra žinoma ar atidirbta komanda. Kaip pavyzdys - žingsninis variklis.
Uždaroje servo kilpoje grįžtamajį ryšį užtikrina daviklis. Greičio kilpoje (Velocity loop) - tai dažniausia tacho generatorius (arba holo daviliai brushless varikliuose, DC varikliams yra variantas su inkaro itampos matavimu - bet siauresnis valdymo diapazonas - kur tai 1:100), pozicijos (Position loop) - impulsinis daviklis (encoder), sroves kilpoje (Torgue loop)- srovės matavimo mazgas. Šiuolaikinėse pavarose dažniausiai kontroliuojami visi aukščiau išvardinti parametrai. Na, gal tacho generatoriaus signalas gaunamas atiktinkamai apdirbus impulsinio daviklio signalus.
O šitaip atrodo tikra šiuolaikinė skaitmeninė servo pavara (digital servo drive).
Pavara sveria 50g (be radiatoriaus) ir gali atiduoti iki 500W pastovaus galingumo (arba pike iki 1000W) !!!!

Kas gi tas impulsinis daviklis?
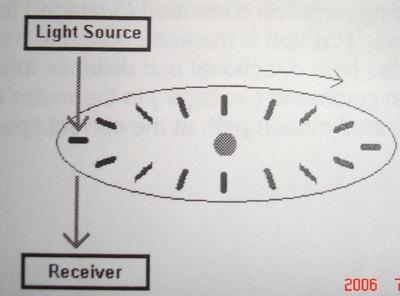
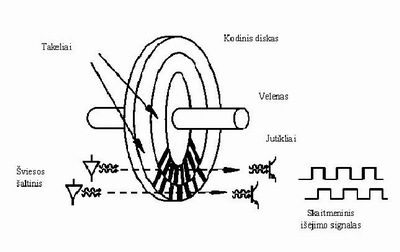
Tai prietaisas išduodantis impulsus, priklausančius nuo variklio sukimosi (greičio, krypties ir pasisukimo kampo). Yra ir tiesiniai davikliai (Linear encoder, “liniuotės”) , bet kol kas juos palikime ramybeje ir pakalbėkime apie apskritiminius (rotary encoder).
Dažniausia tai optinis prietaisas, turintis diską su besisukančiu disku, ant kurio yra sugraduotos padalos (gali buti stiklinis, ar metalinis - tuo atveju gradacija daroma kiaurai - perforuotas). Papildomai yra šviesos saltinis ir foto imtuvas.
{kind=link}
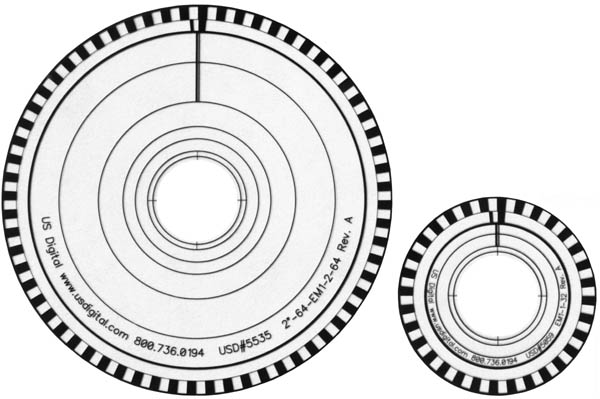

Disko vaizdas
Čia rasite informacijos, kaip pasigaminti savo encodery namuose:
http://www.societyofrobots.com/sensors_encoder.shtml
Dabar naudojami šie optiniai elektroniniai enkoderiai:
1. Prieauginiai enkoderiai (incremental encoder).
2. Absoliutieji enkoderiai (absolute encoder)
Prieauginiai enkoderiai yra optiniai elektroniniai matavimo keitikliai, kurių veleno sukimosi greičio arba kampinės padėties vertė gaunama sumuojant matavimo prieaugius. Jie taip pat naudojami ir atstumui matuoti. Prieauginiuose enkoderiuose naudojamas fotoelektrinis informacijos nuskaitymas. Optiniuose elektroniniuose enkoderiuose sinusinius išėjimo signalus galima 10, 20, 50, 100, 400, 500, 1000 kartų dauginti (komparatoriaus pagalba “sukapojama sinusoide”) ir toliau apdoroti informacijų. Dėl dviejų signalų, tarp kurių yra 90° fazių skirtumas, interpoliacijos pasiekiama didelė skyra. Tai leidžia šiuos signalų tipus naudoti sistemose, kuriose reikalingas labai didelis tikslumas, pavyzdžiui, labai mažo sukimosi greičio arba labai tiksliose pozicionavimo skaitmeninėse pavarose. Absoliutieji enkoderiai yra optiniai elektroniniai matavimo keitikliai, kuriuose veleno kampinės padėties vertė gaunama tiesioginio nuskaitymo būdu nesumuojant pavienių matavimo prieaugių. Jie taip pat naudojami ir atstumui matuoti. Šiuose enkoderiuose naudojamas taip pat fotoelektrinis informacijos nuskaitymas. Skirtingai nei prieauginiai optiniai elektroniniai enkoderiai, kurie turi vieną matavimo takelį, absoliutieji enkoderiai turi kelis takelius su radialiais brūkšneliais. Kodiniame diske yra matavimo ir kodavimo takeliai. .
Absoliutieji enkoderiai yra dviejų tipų: vienasūkiai ir daugiasūkiai. Vienasūkiai enkoderiai naudojami sistemose kuriose matavimas vyksta vieno apsisukimo ribose. Atsižvelgiant į skilčių skaičių jie gali turėti iki 16 384 (14 bitų) pozicijų. Tai atitinka 0,022° = 1,3′ kampinę skiriamąją gebą. Daugiasūkiai enkoderiai naudojami, kai reikia matuoti veleno kampinę padėtį ir jo apsisukimų skaičių. Gali turėti iki 8 19 (13 bitų) kampinių padėčių per vieną apsisukimą ir iki 4 096 (12 bitų) apsisukimų. Tai atitinka 33.5 milijono padėčių
Toliau pasnekesime apie incremental encoderius.
Enkoderis išduoda tokius signalus:
Enkoderiai gali turėti kelis išėjimo kanalus:
1. Enkoderiai su vienu išėjimo kanalu. Tokiuose enkoderiuose negalima nustatyti sukimosi krypties.
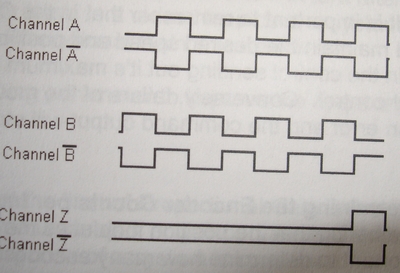
2. Enkoderiai su dviem išėjimo kanalais. Tokie enkoderiai naudojami sistemoms, kuriose reikia nustatyti sukimosi krypti. Tam reikalingi du išėjimo A ir B kanalai kurių impulsų fazių skirtumas būtų 90°.
3. Enkoderiai su trimis išėjimo kanalais. Be A ir B kanalų, enkoderiai turi 0 kanalą, per kurį kas apsisukimą perduodamas 0 signalas. Jis gali būti panaudotas kaip atskaitos signalas pirmo apsisukimo metu po maitinimo įjungimo. 0 impulsas yra kanalų A ir B signalų loginė suma (IR.)
Signalas A perstumtas Signalo B atzvilgiu 90 laipsnių. Gal todel tokie davikliai yra vadinami sin-cos.
Išėjimo signalai toliau apdorojami elektroninėje schemoje iki tam tikros skaitmeninės arba analoginių signalų įtampos vertės. Signalų lygis priklauso nuo toliau naudojamos elektronikos. Iššėjimo lygių buna įvairių - nuo 1 V iki 24V. Dažniausia naudojami TTL 5V.
Paveiksliuke parodytas diferencinis isejimo signalas - jis atsparesnis trukdziams ir leidzia perduoti signala didesniu atstumu.
Dar vienas niuansas - quadrature encoder. Kaip pavyzdį paimkime 500 impulsų per apsisukimą daviklį. Jei skaičiuoti paprastu režimu - vienas apsisukimas tiek impulsų ir duos. Tačiau tai labai sistemos vibracijoms ir elektriniams triukšmams neatsparus režimas.
Naudojamas vadinamasis quadrature (4x) režimas. Signalas kaip ir padauginamas iš 4 (dekoduojama pagal pradini signalo fronta). Viso gaunasi jau 2000 impulsų per apsisukimą. Šitas režimas praktiškai visur ir naudojamas.O cia kiek civilizuotesnis aprasymas anglu kalba:
http://www.designnews.com/article/CA208968.html


