
Cheopso piramidės paslaptį bandys atskleisti robotas
2010 08 12 12:31 Britų mokslininkų ir inžinierių kuriamas robotas bus pasiųstas Cheopso piramidės šachtą, kad atvertų paslaptingas dureles iš kalkakmenio ir pamatytų, kas yra už jų.
Britų mokslininkų ir inžinierių kuriamas robotas bus pasiųstas Cheopso piramidės šachtą, kad atvertų paslaptingas dureles iš kalkakmenio ir pamatytų, kas yra už jų.
Egipto Senienų taryba, prižiūrinti senovės Egipto paveldą, ir Lydso universiteto (D. Britanija) robototechnikos specialistai tikisi, kad XXI amžiaus technika padės įminti itin intriguojančią Cheopso piramidės ertmių paslaptį, skelbia dienraštis „The Independent“.
Pagal „Djedi“ tyrimų projektą, taip pavadintą senovės Egipto žynio Djedi, patarinėjusio faraonui Cheopsui Didžiosios piramidės Gizos plokščiakalnyje statybos klausimais, būsimasis robotas tirs dvi iki šiol iki galo neištirtas Karalienės kameros šachtas. Pirmą kartą šios ventiliacijos ertmes primenančios šachtos, iš Cheopso piramidės Karaliaus ir Karalienės kamerų sienų kylančios 45 laipsnių kampu, buvo atrastos 1872 metais, teigiama pranešime.
Cheopso piramidė, egiptologų manymu pastatyta maždaug prieš 2560 metų iki mūsų eros, yra paskutinysis iki mūsų dienų išlikęs senovės pasaulio stebuklas. Jos centre yra dvi sąlyginai nedidelės patalpos, vadinamos Karaliaus ir Karalienės kameromis. Iš Karaliaus kameros sienų 45 laipsnių kampu kyla dvi 20×20 centimetrų dydžio kalkakmenio šachtos. Kai kurių mokslininkų manymu, šios piramide į dangų kylančios ertmės senovės egiptiečių buvo paliktos tam, kad jomis po mirties į dangų galėtų iškeliauti faraono siela. Tačiau iki šiol nėra jokių įrodymų, kad akmeniniai sarkofagai piramidėje galėjo būti naudojami mirusiųjų laidojimui.
Karalienės kameroje taip pat yra 2 tokios šachtos, tačiau, priešingai nei Karaliaus kameroje, jos neveda į piramidės išorę.
1992 m. mokslininkai, pasitelkę vokiečių inžinieriaus Rudolfo Gantenbrinko pagamintą robotą „Upuaut-1“, pasiuntė jį kopti karalienės kameros šachta į viršų. Tačiau įveikus 60 metrų atstumą roboto vaizdo kamera parodė, kad robotui užkirto kelią kalkakmenio luitas su dviem į varį panašaus metalo rankenėlėmis.
Po 10 metų „Upuaut“ tyrimų projektą ėmėsi tęsti antrasis robotas „Upuaut-2“. Šiam robotui pavyko pragręžti jo pirmtakui kelią pastojusią kalkakmenio sienelę ir įkišti vidun prie šviesolaidžio pritvirtintą miniatiūrinę vaizdo kamerą. Deja, tyrinėtojų laukė nusivylimas – užuot monitoriaus ekrane išvydę paslėptą lobį, už maždaug 20 centimetrų jie pamatė šachtoje įrengtas antras dureles.
„Djedi“ projekto tikslas – įveikti naują kliūtį ir pakilti šachta iki pat jos pabaigos. Egipto Senienų tarybos atstovai ir britų inžinieriai tikisi, kad naujasis robotas galės šį kelią įveikti per vienerius metus.
Pranešama, kad šiuo metu Lydso universiteto specialistai baigia konstruoti „Djedi“ robotą. Kelionę Cheopso piramidės ertmėmis jis turėtų pradėti dar iki šių metų pabaigos, sakoma pranešime.
Šiame vaizdo siužete – Cheopso piramidės vidaus 3D kompiuterinis modelis.
Inf. šaltinis: Balsas.lt
Robotai pagalbininkai: RIBA
2010 08 11 12:40RIBA (Robot for Interactive Body Assistance) – robotas, sukurtas Japonijoje, Fizinių ir cheminių tyrimų institute. Jis padeda pacientams vaikščioti, atsisėsti arba atsistoti. Taip pat jis gali pakelti žmogų ir pernešti jį į kitą vietą.
Kodėl jo reikia? Žmonija sensta. Pavyzdžiui, JAV 2030 metais gyvens daugiau kaip 70 mln. žmonių, perkopusių 65-erių metų slenkstį. Todėl toks robotas ligoninėse ir vienišų senukų namuose labai reikalingas.

Kaip veikia? Roboto rankose sumontuoti 454 jutikliai, kurie ir padeda šiam pagalbininkui pakelti žmogų ir jį nugabenti į reikiamą vietą. Toks robotas sugeba atpažinti žmonių veidus, balsus ir įvykdyti įvairias komandas. Tereikia ištarti: „RIBA, padėk man atsikelti nuo sofos”, ir robotas klusniai įvykdys šį paliepimą. Ligoninėse bei senelių namuose jis bus pradėtas naudoti kitąmet.
Inf. šaltinis: Mokslo festivalis „Erdvėlaivis Žemė“
Sukurtas F-1 „Ferrari“ imituojantis robotas
2010 08 10 16:59Vokietijos inžinieriai sukūrė robotizuotą kompiuterinį simuliatorių, tikroviškai imituojantį „Formulės -1“ bolido valdymą ir lenktynių pojūčius.
Paolo Robuffo Giordano vadovaujama Maxo Plancko Biologinės kibernetikos instituto Tiubingene (Vokietija) mokslininkų ir inžinierių grupė suprojektavo ir pagamino robotą, skirtą tikroviškai perteikti „Ferrari“ bolido pilotavimą, pranešė „IEEE Spectrum“.
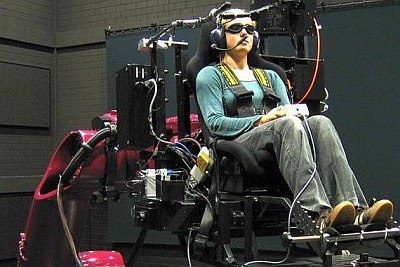
„CyberMotion Simulator“ pavadintas įrenginys – tai ant specialios robotizuotos rankos įrengta kabina. Joje 2,1 metro aukštyje virš žemės sėdi žaidėjas. Kabinoje įrengtas ekranas, bolido vairas ir kitos valdymo priemonės tikroviškai imituoja lenktynių trasa lekiantį „Ferrari F2007“ lenktyninį automobilį.
Pasak leidinio, Biologinės kibernetikos instituto specialistai norėjo sukurti robotizuotą judesius imituojančią sistemą, kuri padėtų tirti, kaip žmones veikia judėjimo pojūčiai. Vokiečių inžinieriai nusprendė, kad šiam tikslui geriausiai tiks F-1 bolido imitatorius.
Pranešama, kad F-1 „Ferrari“ imituojančio roboto projektas buvo pristatytas pavasarį vykusioje tarptautinėje EEE Robototechnikos ir automatikos konferencijoje. Na o dabar galima pamatyti ir šio įrenginio veikimą.
Inf. šaltinis: Balsas.lt
Laipiojantis robotas
2010 08 06 09:18Jutos universiteto inžinierių sukurtas robotas skirtas laipioti sienomis. Atrodytų, tokių jau yra, tačiau šis naudoja naują judėjimo principą ir pasiekė efektyvumo rekordą – net 20 procentų jo sunaudojamos elektros energijos virsta potencine energija. Palyginimui, vidaus degimo variklio efektyvumas yra apie 25 procentai.
Šis robotas visai nedidelis – sveria kiek daugiau nei kilogramą, jo aukštis nesiekia pusmetrio.
Ypatingas jis tuo, kad lipimui naudojasi švytuoklės principu: kairėje ir dešinėje „rankose“ jis turi kablius – kuomet vienu įsikabina į sieną, švytuoklė ima judėti į priešingą pusę, pasikeičia svorio centras ir antroji „ranka“ pakyla ir įsikabina į sieną.
Beje, būtent taip laipioja ir nemažai gyvūnų, pavyzdžiui, beždžionės.
Inf. šaltinis: MokslasPlius.lt
Japonijoje sukurtas pašnekovą mėgdžiojantis robotas
2010 08 03 08:25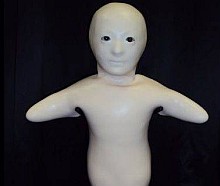
Japonijos Priešakinių telekomunikacijų tyrimų instituto ir Osakos universiteto atstovai visuomenei pristatė robotą, gebantį imituoti vaizdo telefonu skambinančio pašnekovo balsą ir judesius, pranešė „Physorg.com“.
„Telenoid R1“ pavadintas robotas, remdamasis perduodamu telekonferencinio ryšio vaizdo bei garso srautu, imituoja toli esančio žmogaus balsą bei gestus, taip sudarydamas įspūdį, neva pašnekovas yra priešais tave, teigiama pranešime.
Specialūs davikliai robotui perduoda indormaciją apie žmogaus galvos, veido ir rankų judesius. Bandymų metu „Telenoid R1“ „apsimetinėjo“, kad su seneliu kalbasi jo vaikaitis, po to imitavo, kad su vyresniojo amžiaus žmogumi nuotoliniu ryšiu bendrauja gydytojas.
Robotą sukūrę specialistai tikisi, kad jis bus naudojamas realiomis gyvenimo situacijomis, pavyzdžiui, vienišų senyvo amžiaus žmonių namuose, kad galėtų atstoti „šeimo narį“.
„Telenoid R1“ išvaizda buvo pasirinkta taip, kad robotas galėtų imituoti bet kokio amžiaus pašnekovus – ir moteris, ir vyrus, teigiama pranešime.
Masinei rinkai skirta „Telenoid R1“ modifikacija kainuos apie 700 000 japonijos jenų (apie 8 000 JAV dolerių). Šiame vaizdo siužete galima „Telenoid R1“ sugebėjimus.
Inf. šaltinis: Balsas.lt
Vaikščiojantis robotas pasiekė pasaulio rekordą
2010 07 25 11:20Kornelio universitete (JAV) pagamintas robotas „Ranger“ pasiekė neoficialų pasaulio rekordą: per 11 valandų jis nuėjo 22,8 kilometrų atstumą, teigiama universiteto pranešime.
Ankstesnis roboto nueito atstumo neoficialus pasaulio rekordas priklausė kitos JAV bendrovės – „Boston Dynamics“ – sukurtam robotui „BigDog“. Jis buvo be sustojimų sukoręs 20,48 kilometrų atstumą, skelbia „Physorg.com“. „BigDog“ kuriamas JAV Gynybos departamento Priešakinių gynybos tyrimų agentūros (DARPA) užsakymu, šis nešulinis robotas turi gabenti kariams skirtus krovinius ir amuniciją sudėtingo reljefo sąlygomis.
Roboto „Ranger“ plėtros projektą finansuoja JAV Nacionalinis mokslo fondas. Pasak jį tobulinantiems inžinerijos studentams vadovaujančio Kornelio universiteto teorinės ir taikomosios mechanikos profesoriaus Andy Ruina, vienas iš šio projekto tikslų – pademonstruoti energijos vartojimo efektyvumą. Skirtingai nuo kitų vaikščiojančių robotų, naudojančių variklius kiekvienam judesiui aktyvuoti, „Ranger“ atrodo labiau atsipalaidavęs ir panašesnis į einantį žmogų, nes statydamas kojas išnaudoja sunkio jėgą ir judesio kiekį.
Šiame vaizdo siužete – ankstesnis roboto „Ranger“ pasiektas ėjimo rekordas.
Inf. šaltinis: Balsas.lt
Sukurtas robotas su sintetiniu žarnynu
2010 07 20 22:39Autonominiams robotams, kurie galėtų save išlaikyti be žmogaus įsikišimo, būtinas energijos šaltinis, kurį galėtų pasipildyti patys. Vienas būdas – projektuoti prie elektros lizdo prisijungti gebančias mašinas. Tačiau robotikos mokslininkų vizijose – androidai, galintys valgyti ir virškinti (tiesiogine prasme) atliekas bei biomasę.
Taip maitindamiesi, robotai turėtų sugebėti pasigaminti energijos. Tuo vadovaudamiesi, Didžiosios Britanijos Anglijos Vakarų universiteto (University of the West of England) „Bristol Robotics Lab“ robotikos laboratorijos mokslininkai sukūrė pirmąjį sintetinį žarnyną, kurį būtų galima panaudoti kuriant autonominius robotus.
Biomasę „valgantys“ robotai nėra nauja koncepcija. Jau praeityje daugelis mokslininkų yra pademonstravę, jog mikrobiniuose kuro elementuose (angl. microbial fuel cell – MFC) organinę medžiagą galima skaidyti į vandenilio atomus, kuriuos po to galima panaudoti kaip kurą mašinoms. Tačiau sintetinis žarnynas pirmasis turi galimybę pats pašalinti šio proceso metu susidarančias atliekas. Tyrinėtojų sukurtas robotas „Ecobot III“ sugeba įsiurbti savo „patiekalus“ – iš dalies apdorotą organinėmis maitinamosiomis medžiagomis praturtintą tirpalą, perdirba jį į kurą ir, viską suvirškinęs, atlieka savotišką tuštinimosi proceso „ritualą“.
Metodas yra palyginti paprastas: robotas pats susiranda maitinamojo tirpalo išdavimo įrenginį ir iš ten pasiima, ko jam reikia. Tirpalas paskirstomas į bakterijomis užpildytus 48 MFC elementus, kur jis yra metabolizuojamas į vandenilio atomus. Persiskirstant elektros krūviui, generuojama elektros srovė. Robotas pavydėtinai tiksliai – kas 24 valandas – ištuština sintetinio žarnyno atliekas į specialią atliekų surinkimo kamerą.
„Ecobot III“ jau pademonstravo sugebėjimą be pagalbos išgyventi septynias dienas. Norint išlaikyti stabilų energijos tiekimą, jam būtinas ne tik maistas, bet ir vanduo, kuris dalyvauja kuro elemento viduje vykstančiuose elektros generavimo procesuose. Tuo tikslu mechanizmas periodiškai „atsigeria“ iš specialaus rezervuaro. Tiesa, kol kas jis juda lėtai, o energijos gamybos efektyvumas yra labai nedidelis – iš maisto pavyksta įsisavinti vos vieną procentą jame slypinčios cheminės energijos.
„Ecobot III“ naudojama MFC technologija, įvertinant dabartines jos charakteristikas, tikriausiai ne itin domina didesnius projektus, tokius kaip „DARPA Energetically Autonomous Tactile Robot (EATR)“. Tačiau DARPA atveju EATR robotas energiją gauna biomasę skaidydamas ne mikrobais, o paprasčiausiai ją degindamas kaip kurą. Tuo tarpu mikrobai gali skaidyti daug platesnės įvairovės organinę medžiagą. Patobulinus mikrobinių kuro elementų efektyvumą, tokie autonominiai robotai gali tapti visai naudingi – jei ne karyboje, tai buityje.
Inf. šaltinis: Balsas.lt
Pagamintas robotas gėrimams nešioti
2010 07 12 15:17JAV bendrovė „Willow Garage“, kurianti techninę ir programinę įrangą robotams, pranešė išmokiusi savo sukurtą robotą PR2 nešioti iš šaldytuvo alų ir gaiviuosius gėrimus.
 „Willow Garage“ nuotr. |
|---|
Ištroškusiems bendrovės darbuotojams dabar tereikia savo kompiuterio ekrane paleisti WWW sąsają, pasirinkti norimos rūšies alų ir spustelėti mygtuką „Atnešk alaus“, sakoma „Willow Garage“ pranešime.
PR2 robotas, gavęs šią komandą, nurieda prie šaldytuvo, atidaro jį, nuskenuoja jo turinį naudodamas optinio ženklų atpažinimo programą, identifikuoja reikiamos rūšies alų, paima jį iš lentynos, uždaro šaldytuvą ir atneša jį „užsakovui“. Jei reikia, robotas gali ir atidaryti butelį.
Beje, įdomu, kad robotas neatiduoda alaus bet kam – jame įdiegta veidų atpažinimo sistema. Tik tada, kai jis atpažįsta veidą, geležinis roboto rankos gniaužtas atsileidžia, ir galima paimti gėrimą.
Šiame vaizdo siužete pristatomos gėrimus nešiojančio roboto galimybės.
Inf. šaltinis: Balsas.lt
Sukurtas robotas – driežas
2010 07 07 07:40Robototechnikos pasiekimai išmokė robotus ne tik vaikščioti, bėgioti, plaukioti, nardyti ir skraidyti. JAV inžinieriai sukūrė pirmąjį pasaulyje robotą – driežą, galintį įsirausti į smėlį ir judėti jame.
Pasak tokio roboto prototipą pristačiusių Džordžijos Technologijos instituto Atlantoje (JAV) mokslininkų, driežus imituojantys robotai gali padėti žmonėms, po žemės drebėjimo ar technologinės katastrofos įkalintiems po palaidų nuolaužų sluoksniu.

Judėti smėlyje yra sunkiau, nei ore ar vandenyje, nes smėlis gali „elgtis“ ir kaip tvirta medžiaga, ir kaip skystis, teigia amerikiečių mokslininkai. Būtent dėl to yra sudėtinga apskaičiuoti, kaip objektas gali judėti įsirausęs į smėlį.
Tačiau rasti atsakymą į šį klausimą padėjo paprastieji scinkai – nedideli šiltuose kraštuose gyvenantys driežai, gebantys greitai įsirausti į smėlį ir judėti po juo, pasakoja „New Scientist“. Džordžijos Technologijos instituto mokslininkų grupė, vadovaujama Danielio Goldmano ir Ryano Maladeno, remdamasi šios rūšies driežų stebėjimais, išsiaiškino, jog paprastasis scinkas, „paniręs“ po smėliu, išskečia savo galūnes į šalis ir juda į priekį kraipydamasis į vieną ir kitą pusę.
Amerikiečių tyrėjai savo stebėjimų rezultatus panaudojo kompiuteriniam tokio driežo judėjimo modeliui sukurti. Remiantis juo paaiškėjo, kad gyvatės formos robotas, kurio „kūnas“ sudarytas vos iš septynių segmentų, gali laisvai judėti biriame grunte, pavyzdžiui, smėlyje.
Džordžijos Technologijos institute buvo sukurtas 35 centimetrų ilgio paprastojo scinko judesius imituojantis robotas, sudarytas iš šešių elektros varikliukų valdomų 7 aliumininių segmentų, apvilktų itin elastinga sintetine medžiaga – spandeksu. Ji apsaugo varikliukus nuo pernelyg didelio suspaudimo ir užsikirtimo.
Bandymų metu į konteinerį su 6 mm skersmens plastikiniais rutuliukais įleistas tokio roboto prototipas pasiekė 0,3 kūno ilgio per vieną judėjimo „bangos“ ciklą greitį. Tai beveik atitinka smėlyje šliaužiančio paprastojo scinko judėjimo spartą. Pasak inžinierių, jei roboto korpusas būtų prailgintas dar keliais papildomais segmentais, suteikiančiais didesnį judesių plastiškumą, jis greičiu prilygtų tikram driežui.
Amerikiečių sukurtas smėlyje šliaužiantis robotas buvo pristatytas Saragosoje (Ispanija) vykusioje „Robotics: Science and Systems 2010“ konferencijoje.
Inf. šaltinis: Balsas.lt
Sukurtas skęstančius gelbstintis robotas
2010 06 30 13:36Šią vasarą prie Kalifornijos paplūdimių pradėjo patruliuoti skęstančius poilsiautojus gelbėsiantys robotai, 6 kartus greitesni už profesionalius gelbėtojus.
JAV bendrovės „Hydronalix“ sukurtas robotas – gelbėtojas EMILY (EMergency Integrated Lifesaving lanYard) šią vasarą pradėjo patruliuoti vandenyne prie Zuma Beach paplūdimio (Malibu, Kalifornijos valstija). Planuojama, kad iki gruodžio mėnesio robotų – gelbėtojų būrį Kalifornijos pakrantėje papildys daugiau nei 20 tokių robotų, praneša „Popsci.com“.
Pirmieji Malibu miesto valdžios „įdarbinti“ EMILY robotai dar nėra savarankiški – juos nuotoliniu būdu valdys paplūdimiuose budintys profesionalūs gelbėtojai, tačiau, pasak „Hydronalix“ atstovų, kitą pavasarį rinką pasieks pirmieji visiškai autonomiški robotai – gelbėtojai. Teigiama, kad jie patys jūroje aptiks pagalbos besišaukiančius žmones ir gelbės juos taip pat patikimai, kaip ir paplūdimiuose budintys gelbėtojai.

Robotas – gelbėtojas EMILY. „Hydronalix“ nuotr.
EMILY naudoja elektros variklius, kurie leidžia pasiekti 45 kilometrų per valandą greitį net esant stipriam bangavimui, jame įrengtas sonaras, fiksuojantis skęstančio plaukiko padėtį po vandeniu. Pasak bendrovės atstovų, šis robotas nelaimės vietą pasiekia maždaug 6 kartus greičiau už profesionalius gelbėtojus. Skęstančiam žmogui tereikia įsitverti į atplaukusį ir šalia plūduriuojantį EMILY ir klausytis iš jo garsiakalbio sklindančių paplūdimyje budinčių gelbėtojų nurodymų. Robote įmontuota vaizdo kamera leis jiems greitai įvertinti situaciją, nuraminti nelaimėn patekusį žmogų ir perduoti jam nurodymus – laikytis įsitvėrus į kranto link plaukiantį robotą ar plūduriuoti ir laukti, kol atskubės profesionalūs gelbėtojai.
Autonominis EMILY modelis kainuos 3500 JAV dolerių ir, pasak „Hydronalix“ prezidento Tony Mulligano, galės arba savarankiškai patruliuoti jūroje, arba pradėti gelbėjmo operaciją nuleistas į jūrą iš laivo ar sraigtasparnio. Skęstantys žmonės aptinkami naudojant EMILY sonarą. Energiją roboto – gelbėtojo varikliams tiekia baterija, kurios talpos pakanka iki 130 kilometrų atstumui nuplaukti.
Šiame vaizdo siužete – EMILY roboto paleidimas iš katerio.
Inf. šaltinis: Balsas.lt