
Gimsta dar vienas botas (papildyta-3) / Rodman
2007 11 20 19:17Robotas skirtas dalyvauti Robotika-2008 varžybose Rygoje, disciplinoje “Line following”.
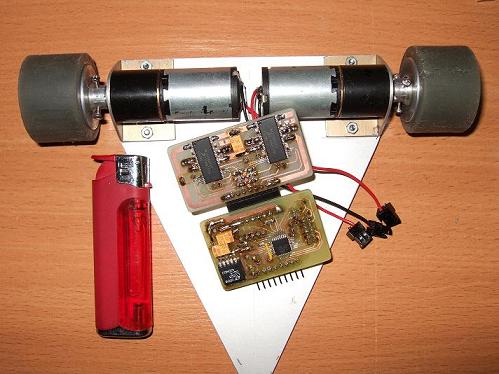
Pagaliau surinkau visas detales. Turiu maxon variklius, variklių draiverius, linijos sensorius.
Sulipdžiau pagrindinę pcb ir atskirą pcb su variklių draiveriais(kad galima būtu lengvai išimti ir panaudoti kitame projekte)
Pirmas normalus važiavimas. Pusė maksimalaus greičio.
Antras važiavimas. Maksimalus greitis(prie turimo akumo).
Trečias važiavimas. 3-cell lipo. REALLY FAST ![]()
motorai 110117:
http://test.maxonmotor.com/docsx/Download/catalog_2007/Pdf/07_109_e.pdf
linijos sensoriai:
http://www.vishay.com/docs/83752/tcrt1000.pdf
variklių draiveriai:
http://www.ortodoxism.ro/datasheets/motorola/MC33887.pdf
įtampos reguliatorius:
http://www.ortodoxism.ro/datasheets/lineartechnology/152935fa.pdf
pagrindinis kontroleris - Atmega8
Gerą pusvalandį stabdžiau su mega8 pajungimu. Nemato jos programatorius, nors tu ka daryk. Praskambinau dešimt kartų visus takelius, dvidešimt kartų maitinimą pamatavau. Paskui, gerai parūkęs, pamačiau, kad programatoriaus fiškę atvirkščiai prijungęs buvau ![]()
Pagaliau paleidau PID reguliavimą linefolloweriui. Vakar keletą valandų gadinau sau nervus, negalėdamas suprasti, kodėl niekas neveikia. Buvo kaltas, kaip visalaik, mano žioplumas. Robotas valdomas per TV pultą. Robotui sustabdyti buvo tikrinama, ar nenuspaustas STOP mygtukas. Tikrinimo paprogrameje buvo įvestas 200 ms užlaikymas, kad sumažinti komandų priėmimo greitį reguliuojant PID parametrus. Panaikinau užlaikymą- viskas pasitaisė ![]()
Programa jau išsipute iki 6kB. Dabar yra:
1. sensorių autokalibravimas ir kalibravimo rezultatų peržiura.
2. variklių testavimas: greičio ir krypties rankinis reguliavimas.
3. ADC testavimas su sensorių parodymu išvedimu realiame laike.
4. PID parametrų nustatymas BE kontrolerio perprogramavimo.
5. lenktyniu testinis režimas, kai realiame laike išvedama: Pid Error’as; Control reikšmes kiekvienam varikliui
6. gražus lcd MENU, per kurį visa tai valdoma ![]()
2007 11 20 20:32
Na, kaip ir viskas aišku, išskyrus… kokią žolę rūkai?
2007 11 20 21:46
kent rudas )
)
2007 11 21 14:26
kaip manai tiks man elitr sensoriai linijai ? beja kur tos TCRT1000 pirkai lemonoj ner …
2007 11 21 18:55
as jau seniai tau sakiau, kad elitr sensoriai TINKA.
2007 11 22 20:46
o iskur jus gaunat varikliu?
2007 11 22 21:39
ebay- vieta, kur yra DAUG varikliu
2007 11 23 22:03
aciu
2007 11 24 21:51
Seip yra tokia vieta kaip “jonelio kiemas” kaune ten as uz 1lt. nusiperku 2 mini varikliukus vienas normalus, o kito isvis rankose sugraibyt neina .
.
2007 11 26 05:19
gaila kad nuo Klaipedos iki Kauno 200km
2007 11 26 21:23
Na seip visiem mazu robotuku gamintojam tai dar galiu pasakyti, kad prie ju buna akumas : Ismatavimai 1cm x 1cm x 0.5cm, srove ~2A (nes lituojant netycia sulieciau kontaktus isilyde 1.5A laidai), 3.7-4.1V Li-Po akumuliatoriukas, talpa ~100mAh (dar reiks ismatuoti)
2007 12 05 13:55
ar kas nors man galetu paaiskinti kokia prasme tokios placios ratu bazes? juk posukyje robotas galetu zymiai greiciau pasisukt su siauresne baze
2007 12 05 14:25
ratu baze apsprendzia turimu varikliu ilgis

aisku galima istekinti didesnio skersmens ratus, kad jie “uzeitu” ant varikliu, bet pakolkas turima baze mane pilnai tenkina
ir nepamirskite, kad cia dar negalutinis greitis
2007 12 06 19:19
reiskia tokia plati baze nera privalumas? as galvojau kad taip yra kazkodel geriau…
2007 12 07 19:17
Gal ir durnas patarimas bet gal ne

Rodman, dek koki eeproma, tegu ten kontroleris suraso vieno rato sensoriu ir varikliu signalus, o likusius ratus jungia super duper boost mode ir viska varo is atminties, o ne nuo sensoriu.
Gautusi pirmas ratas letesnis, bet visi kiti nesveiki
Jei nusnekejau, nekreipkit demesio
2007 12 10 06:32
man buvo mintis padaryti taip, kad botas prisimintu trasa, bet ko gero paliksiu ta sumanyma kitam kartui.
2008 10 13 14:44
o kaip zinosi kada prasidejo antras ratas?
2009 10 12 20:57
ir kokia esme toki suda gamint? linijos sekimas, sumo roboai…. be jokio AI. Tiesiog SUDAS
2009 12 06 23:58
Kaip malonu, kad dar yra žmonių kas gamina robotukus. Šaunuolis taip tęsk ir toliau!
2009 12 29 17:53
ddd, pasigamink terminatoriu - ne sudas
2010 05 11 01:36
Kur galima pigiai nuspirkti motor draiveriu MC33887?
kokia ju kaina mazdaug? Ir kokios galios varikliu reiktu sumo robotui iki 3kg is keturiu motoru kad save patemptu ir dar 3 kg stumti galetu? Kokia turetu but nominali vieno motoro galia?
2012 02 13 13:30
Iš ko pasidarote tokius ratus? Patys tekinate alimininę dalį?