Infobalt ir robotas
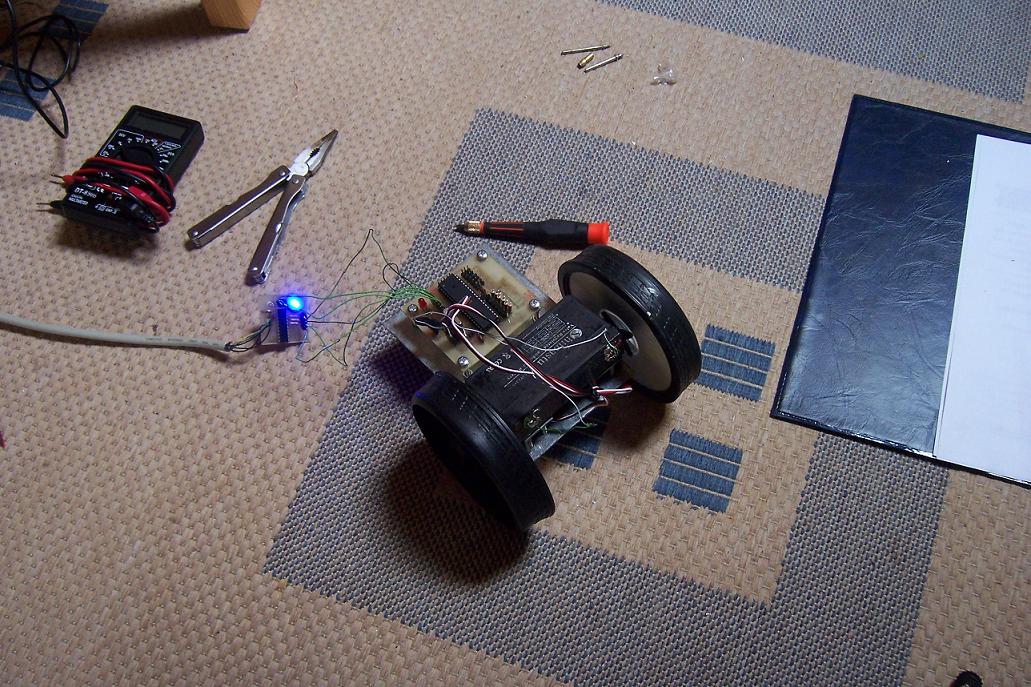
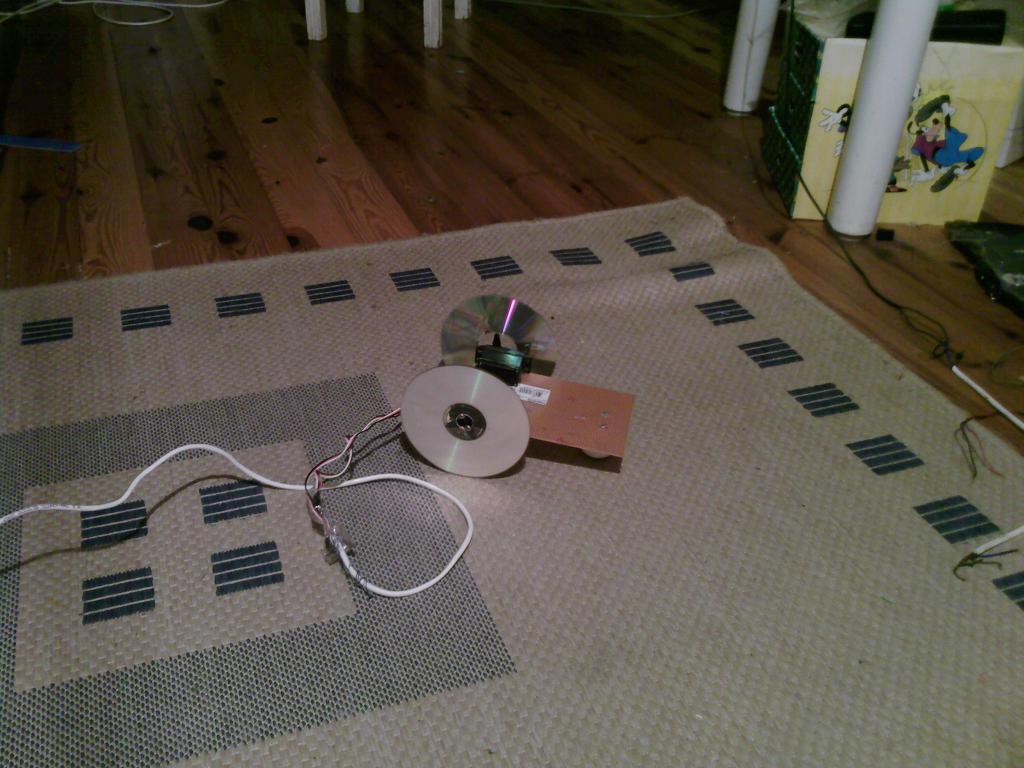
2007-10-26 00:35Kaip tik šiandien sudalyvavau infobalt parodoje su savo robotu. Tiesa, buvo ir šiokių tokių nesklandumų, nes labai sunkiai matė aliuminio sieną. Bet rytojui jau lyg ir sutvarkiau šitą problemą, bent jau matymas pagerėjo bent dvigubai ar trigubai. Na iki to laiko gana daug nerašiau nieko čia, bet robotas jau visiškai autonomiškas, daugiau nuotraukų apie infobalt`ą ir šiaip informacijos galima rasti [url] robotai.elektronika.lt [/url] šiek tiek mano roboto nuotraukų yra čia (tiesa naujausių ptobulinimų dar nenufotkinau.), na maniškiam robote dabar yra 3 sensoriai, t.y. 3 foto diodai (IR šviesos) ir 6 IR LED, dirba jie impulsiškai kiek didesne galia negu galėtų dirbti pastoviai, t.y. su 10 omų varža nuo 6 V. Bet kadangi gana nemažau dažniu mirksi, tai nespėja sudegt. Na kol tai įgyvendinau aišku ne vienas LED iškepė. Kepė ne tik LED`ai, likus porai dienų iki infobalt`o sudegė mano servai, tai praradau gana daug laiko, ir labai gerai, kad rodman`as padėjo, su naujais servais tvarkytis (pasakė, porą dalykų) nes būčiau ilgam užsikuites su jais.:
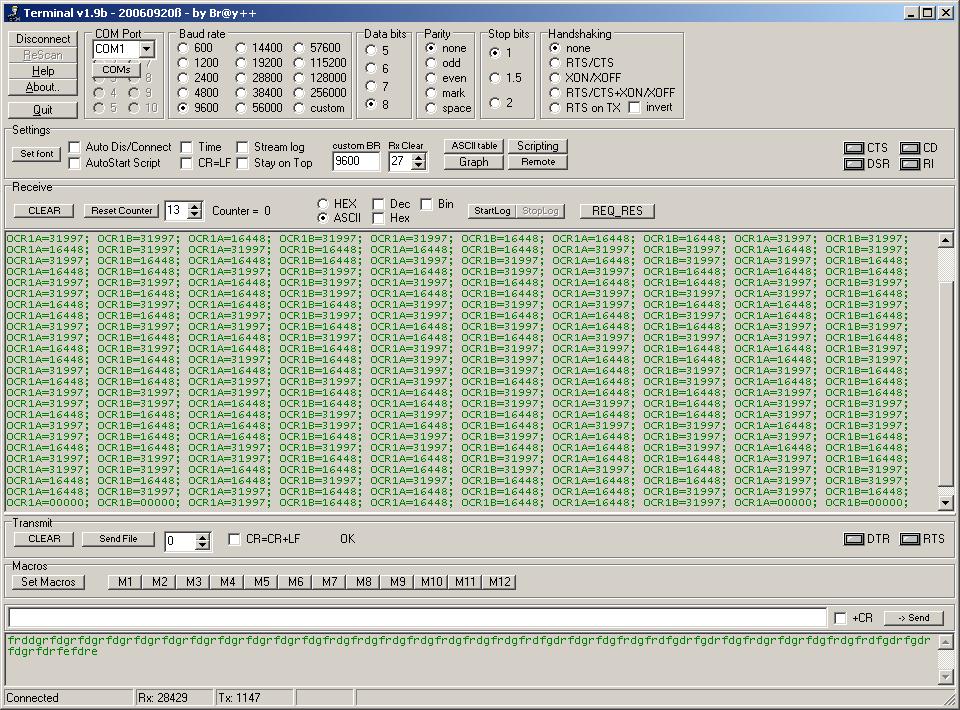
atvažiavo robotukas prie programatoriaus, prisijungė, naujų žinių įgavo, intelekto koeficientą pasikėlė ![]()
![]()
![]()
Na o kad būtų kiek linksmiau darbuotis prie šito padarėlio, atsinešiau šiek tiek garso
P.S. visu garsu nebuvau įjungęs.







{kind=link}