gana užimta savaitė…
2007-11-08 21:08ši savaitė buvo ištiesų man gana užimta, prasidėjo mokslai, rašiau gana didelę programą (tiesa, nes sau), galų gale prasideda elektrinio dviračio visi apmąstymai, kas ir kaip ten turi būt ir t.t.
Sužinojau, kad iš JPM (jaunųjų programuotojų mokykla) testo gavau 79 taškus, kas reiškia, kad kitą pusmetį reikės mokėti tik 50% kainos, nors tai labai manęs netenkina, bet jau pradeda užknisti, nemoko jokios padorios programavimo kalbos, o tik paskalio, kuris dabar niekam jau absoliučiai nebereikalingas manau yra. Todėl paskubomis viską padariau ir atidaviau, nes neturiu noro ten knistis. Ir, deja, nieko naujo nesužinojau iš viso to, ką ten išmokti reikėjo… gal ir neapsimoka man ten mokytis…
Taigi, užtai prasideda dviračio planavimas, variklis yra 250W 24V prie 13A dar gali pastoviai dirbti, tai realiai galia išeina šiek tiek didesnė. sukimo momentas, normaliu apkrovimu 1 Nm, apsukos 2000 rpm (3000 rpm no load) galvoju mažinti apsukas 7 kartus, nors pradedu abejoti, nes gana nedidelis pagreitis išeina, o greitis tai greitis… Nei aš ten turiu noro labai lakstyt nei ką. Akumus galvoju dėti 6×12V ir 7,5A, tai kartu sudėjus išeina, kad paduosiu 24V (po 2 nuosekliai, ir tokios 3 akumų baterijos lygiagrečiai) ir turėsiu 20Ah elektros, kas yra apytiksliai 0,5 kWh. Normaliai važiuojant (kada variklio srebiama galia yra 250W) išeina, kad galėsiu važiuoti 500Wh/250W = 2h manau nuvažiuoti su tiek išeis gana daug.
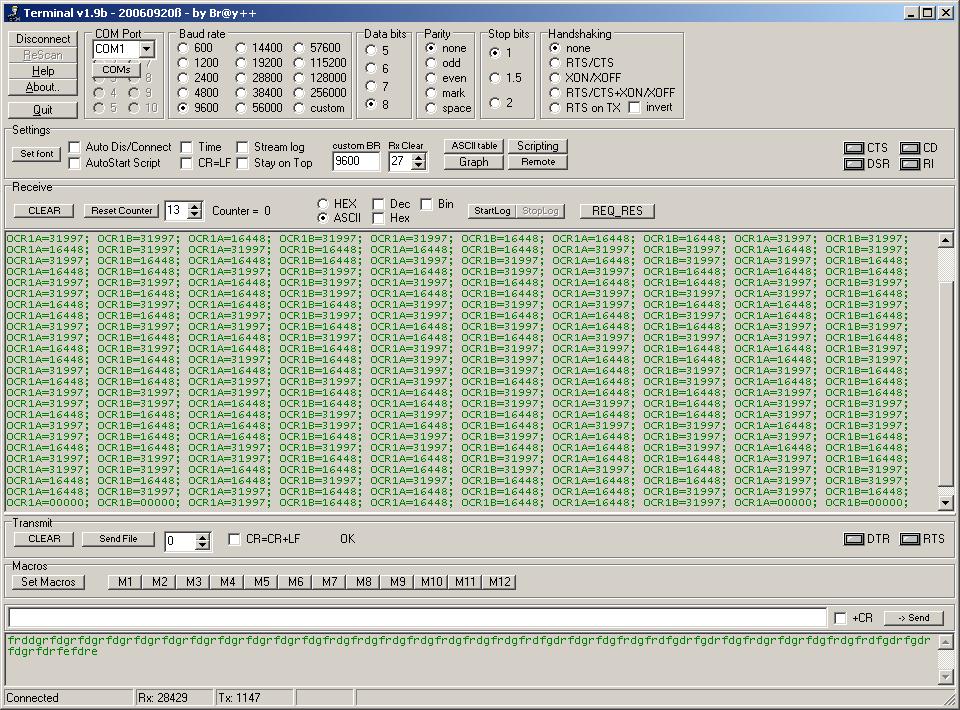
Apsukas aišku valdys ųC per reguliatorių. Reguliatoriuje dėsiu 3x IRF3205 tranzus, gal dar ketvirtą primesiu. Bet atlaikomos srovės turi pakakt, nes 1 toks tranzas atlaiko (pagal datasheet`ą) 100A ![]() .
.
Na šiam kartui tiek.







{kind=link}